

![[Translate to Français:]](/fileadmin/Der_SAC/Unserer_Partner/CSS_cyan_rgb.svg)
Les DVA en test : le point de vue du Club alpin allemand Le facteur décisif reste la bonne organisation des opérations de sauvetage
Les détecteurs de victimes d’avalanches sont toujours plus perfectionnés. La technologie des antennes triples a permis de faire de grands progrès. L’étude menée par le Club alpin allemand (DAV) a cependant mis en évidence la présence sur le marché d’appareils que l’on ne saurait recommander aux touristes sans mise en garde.














Le département Sicherheitsforschung du Club alpin allemand (DAV) a testé pour cette saison les nouveaux détecteurs de victimes d’avalanches (DVA). Les anciens appareils ont fait l’objet d’une nouvelle évaluation en raison des mises à jour de leurs logiciels et d’une nouvelle formulation des critères de test. De nombreux fabricants ont mis sur le marché dès cet hiver une version « allégée » (dans la gamme des prix moyens) de leur appareil de haut niveau. Cette initiative fera certainement beaucoup d’heureux, car ces nouveaux appareils sont moins complexes, et la navigation dans leur menu est plus facile.
Arva présente deux nouveaux modèles : le « Link » dans le haut de gamme, et l’« Axis » un peu plus avantageux. La firme Ortovox de Taufkirchen élargit la palette de ses produits avec le « S1+ », nouveau sommet de sa gamme. La Suisse présente également des nouveautés avec « Element », le petite frère du Mammut « Pulse ». Le « Vector » de Pieps n’est toujours pas disponible, mais la firme propose avec le « DSP-Tour » une version allégée du « DSP ». Il faut aussi mentionner les mises à jour logicielles disponibles pour certains appareils dont le « Pulse » et le « 3+ » de Mammut, ainsi que pour le « S1 » d’Ortovox.
Le département Sicherheitsforschung du DAV a évalué sur des critères d’utilisation pratique tous les DVA couramment présents sur le marché, indépendamment de leurs caractéristiques techniques (nombre d’antennes et traitement des données). Les appareils ont été testés selon les trois phases de la procédure IKAR (recherche du signal, recherche sommaire rapide, recherche rapprochée fine), avec le critère supplémentaire de recherche multiple (plusieurs victimes ensevelies). La localisation précise, c’est-à-dire le sondage après la recherche fine, n’a pas été évaluée, car cette phase ne concerne pas le DVA. L’importance relative des divers critères de test est un facteur important de la comparaison des appareils. Autrement dit : chaque DVA présente des avantages et des inconvénients. Et il ne peut pas être meilleur que son utilisateur ! L’appareil parfait n’existe pas encore.
1 Recherche du signal
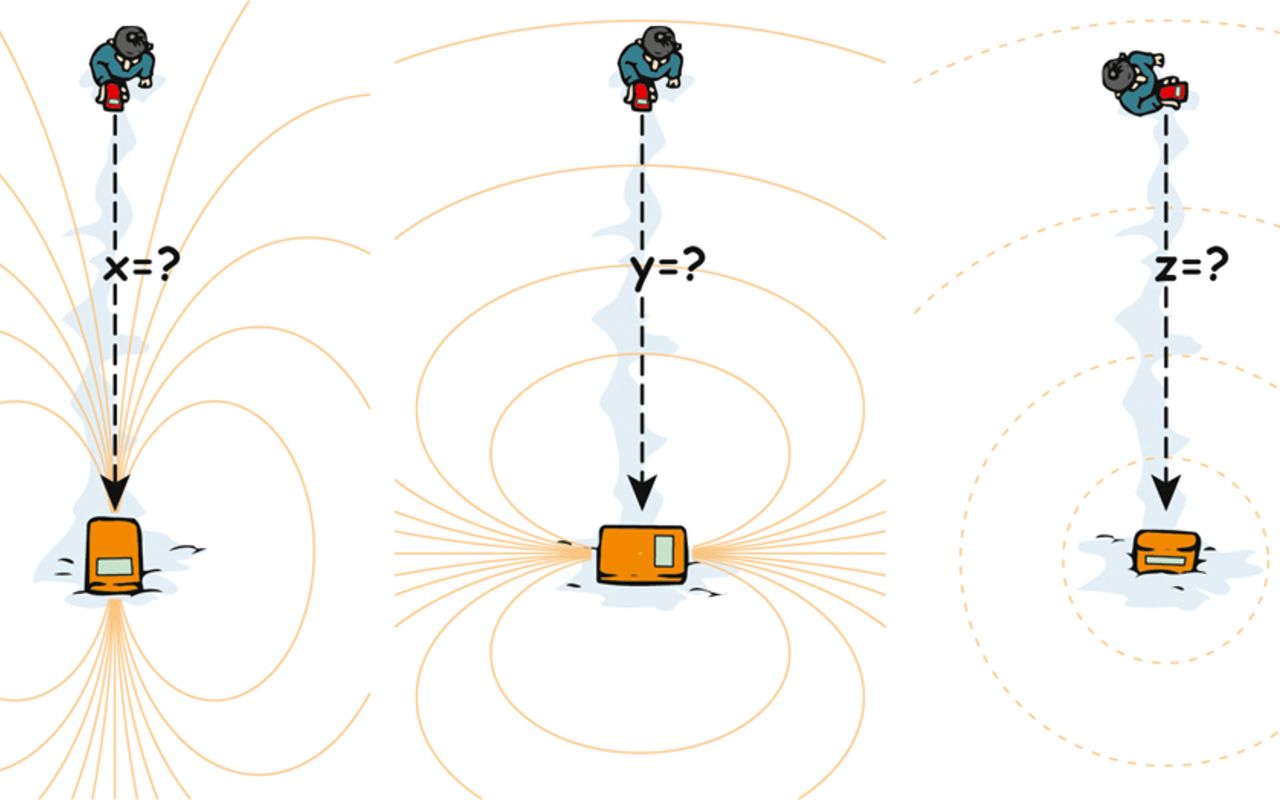
La portée joue un rôle dans la recherche après la première réception d’un signal. D’une façon générale, elle se détermine selon les axes x, y et z des trois antennes. Les tests se sont concentrés sur la portée dans les trois axes, et la moyenne des valeurs mesurées a servi de point de comparaison entre les appareils. Certains appareils (Pieps « Freeride », bca « Tracker DTS », Ortovox « Patroller Digital ») ont été dépréciés du fait qu’ils présentaient une portée réduite dans un des axes ; en situation défavorable de recherche coordonnée, ils étaient à la limite d’une fonctionnalité convenable pour des bandes d’exploration de 20 mètres de large. En particulier et dans certaines conditions (en raison de sa technique numérique à une seule antenne), la capacité de l’appareil Pieps « Freeride » peut être insuffisante lors d’une recherche dans une bande de 20 mètres de large (voir encadré « Portée »).
2 Recherche approximative
Cette phase de recherche commence à réception du premier signal et se termine lorsqu’on se trouve à 5 mètres environ (selon l’indication de l’affichage) de l’émetteur enseveli.
Dans le test, nous avons évalué la persistance de réception du signal le long de la bande de recherche, avec l’antenne émettrice en position horizontale et verticale. Les points suivants ont été évalués en situation réelle :
L’approche dans le domaine « lointain » (après réception du premier signal) est-elle efficace ?
Y a-t-il des indications de réception qui font perdre du temps en pointant sur de fausses directions ?
Y a-t-il perte du premier signal ?
Les distances affichées sont-elles justes, ou les variations indiquées sont-elles excessives ?
Y a-t-il de brusques sauts dans les distances affichées, par exemple de 17 à 6 mètres ?
Le signal acoustique donne-t-il la même information que l’affichage de l’appareil ?
Quelle est la qualité de stabilité de l’affichage des valeurs de direction et de distance lors du déplacement de l’appareil ?
Nos tests ont montré que tous les appareils examinés, sauf le Pieps « Freeride », fournissent des prestations bonnes à très bonnes d’affichage de distance en deçà de 20-25 mètres. Nous avons en conséquence allégé nos catégories d’évaluation par rapport à l’ancien test. Comme les problèmes se posent surtout dans la phase suivant immédiatement la réception du premier signal, c’est là que nous avons centré notre évaluation. Dans cette phase de la recherche, l’important est de disposer d’un guidage directionnel clair et stable. Certains appareils montraient des faiblesses éclatantes sous cet aspect.
3 Recherche fine
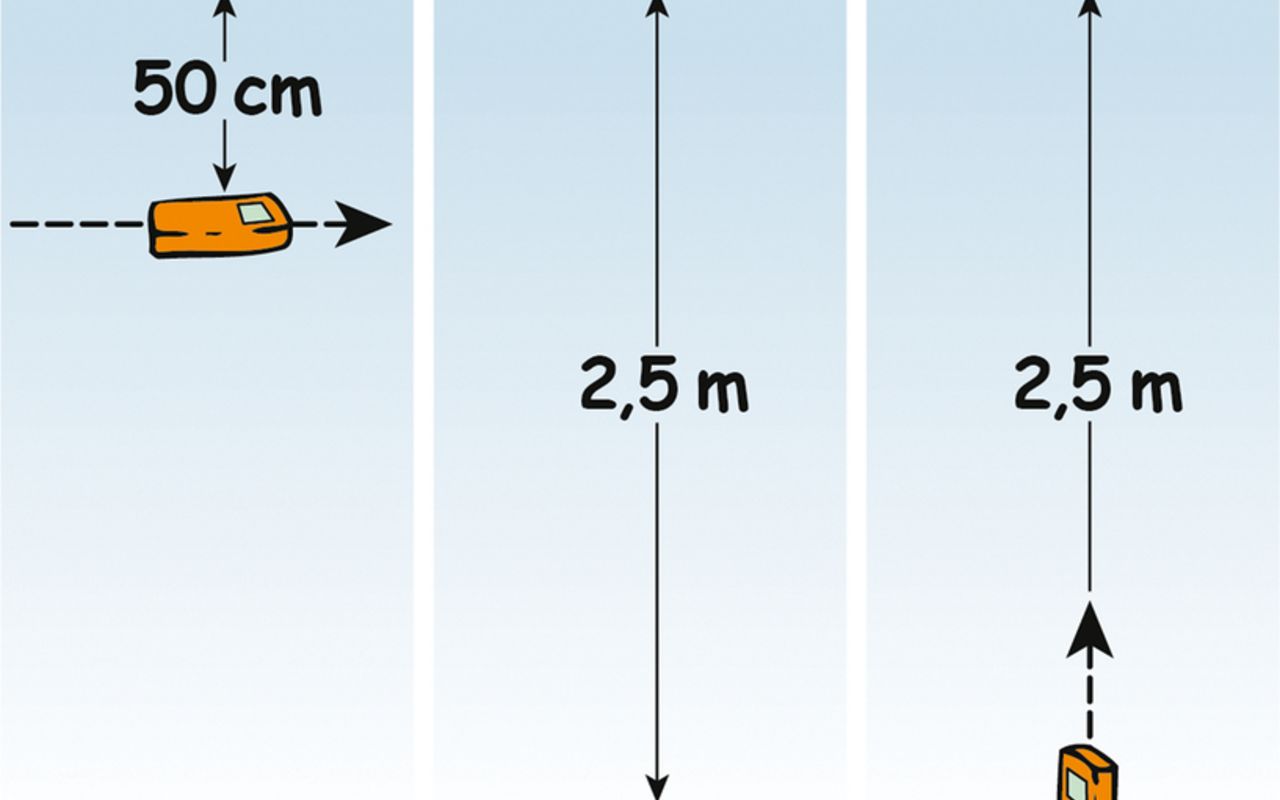
Nous avons évalué les appareils selon deux scénarios (ensevelissement à une profondeur de 50 cm avec émetteur horizontal et ensevelissement à 2,5 m avec émetteur vertical), avec les critères suivants :
La transition de la recherche approximative à la recherche fine est-elle indiquée de manière appropriée ?
Lors de la recherche par recoupements, y a-t-il de fausses indications de distance ?
Les flèches de l’affichage peuvent-elles donner de fausses indications de direction ?
Quelle est la rapidité d’affichage des distances correctes lors du déplacement de l’appareil ?
Les valeurs affichées sont-elles modifiées si l’on retourne l’appareil ?
Le signal acoustique est-il une assistance utile ?
Attention : c’est dans cette phase de la recherche que se font la plupart des erreurs et que l’on perd le plus de temps. Les erreurs que l’on constate le plus fréquemment sont un déplacement trop rapide de l’appareil de recherche, un abandon trop hâtif de la première ligne de recherche ou la reprise trop fréquente du même parcours. C’est aussi dans cette phase que chaque personne impliquée dans la recherche doit s’adapter très précisément à la vitesse de prospection optimale pour l’appareil. L’entraînement joue ici un rôle capital !
4 Ensevelissement multiple (plusieurs victimes ensevelies)
Cette phase de recherche représente la catégorie d’évaluation la plus complexe du test (voir aussi article p. 42). On a examiné d’une part si un appareil reconnaît d’emblée un ensevelissement multiple, et s’il fournit à son utilisateur des informations importantes comme le nombre d’émetteurs détectés, leur distance et/ou leur direction. De plus, les appareils ont été évalués sur la base d’un scénario de test quant à leur résolution spatiale et à leurs fonctionnalités de suivi de la recherche. On a évalué la possibilité de suivi direct, le marquage (ou masquage) rapide et stable d’émetteurs déjà localisés, l’éventualité d’un retour imprévu en mode de recherche d’émetteurs « marqués », la détection de tous les émetteurs ainsi que le fonctionnement rapide et sûr de l’appareil en toute situation.
D’une façon générale, c’est la situation d’ensevelissement multiple qui représente le défi technique le plus complexe pour un DVA. Il ne faut cependant pas accorder trop d’importance à cette fonction, car les ensevelissements multiples avec complications sont plutôt rares. De plus, il est possible d’obtenir de bons résultats avec une stratégie adaptée (méthode des trois cercles ou bandes de recherche étroites). L’important est alors qu’un appareil fournisse des indications exactes sur l’ensemble de la situation afin que l’utilisateur puisse adopter la procédure appropriée. A notre avis, les caractéristiques fonctionnelles les plus importantes d’un DVA sont ses capacités de fournir des informations sur la situation d’ensemble de l’ensevelissement, son aptitude à la recherche approximative et surtout son comportement lors de la recherche fine. Le fonctionnement rapide et stable constitue l’exigence de base posée à un DVA.
Il est apparu clairement que tous les appareils avaient leurs faiblesses dans certaines situations d’ensevelissement multiple. C’est ainsi qu’après le marquage des deux premiers émetteurs, les appareils d’Ortovox, Mammut et Arva n’ont parfois détecté le troisième qu’après un long moment. Et ils nous ont envoyé plus loin à la recherche d’un signal. Par contre, les appareils de Pieps ont parfois confondu un émetteur marqué avec celui qui faisait momentanément l’objet de la recherche. Situation qui met l’utilisateur inexpérimenté dans une situation inextricable. Les appareils pourvus de dispositifs de suivi ne permettent qu’aux utilisateurs exercés de venir à bout de la recherche d’ensevelissement multiple avec le mode « SP ». En alternative, il faut adopter la méthode des trois cercles, qui demande davantage de temps.
Conclusion pour la pratique
La technologie des trois antennes constitue aujourd’hui le standard technique pour les appareils DVA. Comme il y a toujours une des trois antennes en situation privilégiée de réception du signal, il en résulte une amélioration de l’exactitude, de la netteté et de la rapidité de la recherche fine. Les appareils équipés d’une seule antenne comme le « Freeride » de Pieps ou le « F1 » d’Ortovox présentent d’importants inconvénients, surtout lors des recherches sommaire et fine. C’est pour cela qu’on ne peut pas les recommander.
